全站搜索
Product pecification
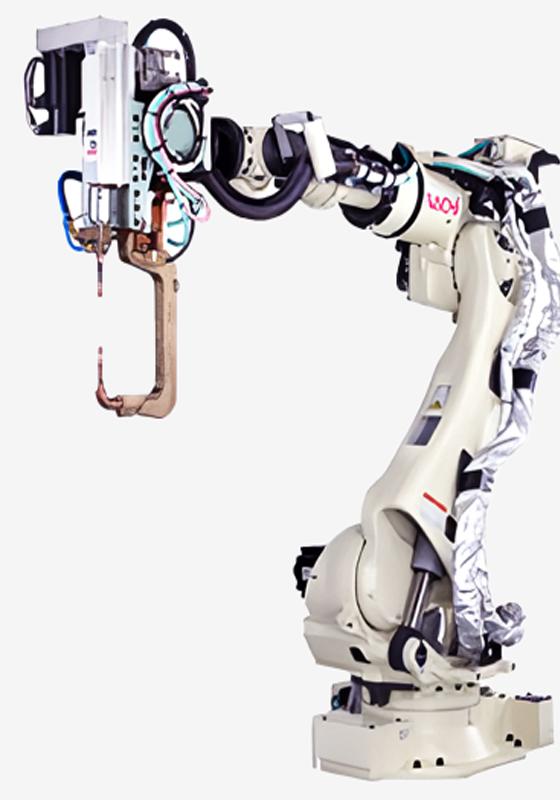
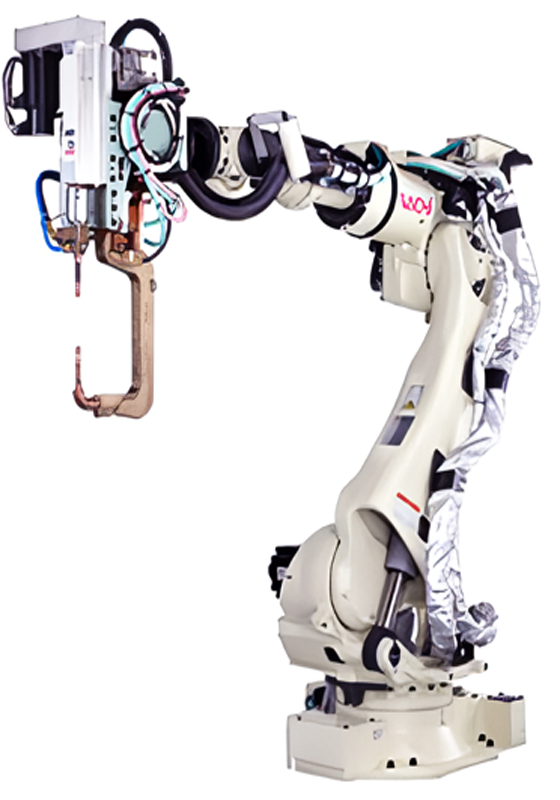
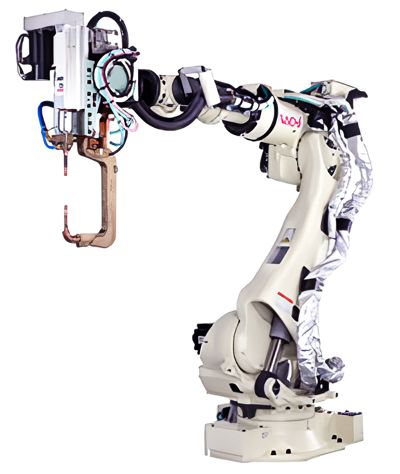
| Robot model | SRA166-01A | SRA210-01A | |||
|---|---|---|---|---|---|
| instructure | joint type | ||||
| number of joint | 6 | ||||
| drive mode | AC servo mode | ||||
| Maximum working range | arm | J1 | rotate | ±3.14rad (±180°) | |
| J2 | front&behind | +1.05~-1.40rad (+60°~-80°) | |||
| J3 | up&down | +2.62~-2.56rad (+150°~-146.5°) | |||
| wrist | J4 | rotate2 | ±3.67rad (±210°) | ||
| J5 | bending | ±2.09rad (±120°) | |||
| J6 | rotate1 | ±3.58rad (±205°) | |||
| Maximum speed | arm | J1 | rotate | 2.18rad/s (125°/s) | 2.01rad/s (115°/s) |
| J2 | front&behind | 2.01rad/s (115°/s) | 1.83rad/s (105°/s) | ||
| J3 | up&down | 2.11rad/s (121°/s) | 1.97rad/s (113°/s) | ||
| wrist | J4 | rotate2 | 3.14rad/s (180°/s) | 2.44rad/s (140°/s) | |
| J5 | bending | 3.02rad/s (173°/s) | 2.32rad/s (133°/s) | ||
| J6 | rotate1 | 4.54rad/s (260°/s) | 3.49rad/s (200°/s) | ||
| Transportable weight | wrist | 166kg | 210kg | ||
| arm※1 | 15kg (Max 60kg) | ||||
| Allowable static load torque | J4 | rotate2 | 951N・m | 1,337N・m | |
| J5 | bending | 951N・m | 1,337N・m | ||
| J6 | rotate1 | 490N・m | 720N・m | ||
| Allowable maximum moment of inertia※2 | J4 | rotate2 | 88.9kg・m2 | 141.1kg・m2 | |
| J5 | bending | 88.9kg・m2 | 141.1kg・m2 | ||
| J6 | rotate1 | 45.0kg・m2 | 79.0kg・m2 | ||
| Position repeatability ※3 | ±0.1mm | ±0.15mm | |||
| ambient temperature | 0~45°C | ||||
| Set conditions | Ground installation, elevation below 1,000m | ||||
| Body weight (kg) | 1,060kg | 1,090kg | |||
 ZSROBOT Standard Product
ZSROBOT Standard Product